





EtherCAT总线协议转换网关案例
EtherCAT转EtherNet/IP协议转换网关实现罗克韦尔PLC与库卡机器人连接通讯的配置案例
EtherCAT转EtherNet/IP协议转换网关实现罗克韦尔PLC与库卡机器人连接通讯的配置案例
EtherCAT转EtherNet/IP实现罗克韦尔ControlLogix与库卡KR C4机器人的实时运动同步
EtherCAT转EtherNet/IP构建罗克韦尔PLC对库卡机器人的高精度扭矩反馈网络
EtherCAT转EtherNet/IP打通库卡机器人与罗克韦尔PLC的安全联锁机制
EtherCAT转EtherNet/IP实现库卡机器人坐标数据批量接入罗克韦尔Studio 5000系统
EtherCAT转EtherNet/IP驱动罗克韦尔PLC与库卡机器人的微秒级时钟同步
EtherNet/IP转EtherCAT构建罗克韦尔PLC与机器人的冗余通信链路
EtherNet/IP转EtherCAT支持库卡机器人参数远程写入罗克韦尔数据库
EtherNet/IP转EtherCAT实现多台库卡机器人与罗克韦尔PLC的群控组网
EtherNet/IP转EtherCAT解决罗克韦尔PLC与库卡机器人的协议兼容
EtherNet/IP转EtherCAT实现机器人故障诊断数据直传罗克韦尔MES系统 
一、案例背景
在新能源汽车产业蓬勃发展的当下,电池模组生产线的自动化和智能化水平至关重要。某知名新能源汽车电池制造商的生产线中,采用了罗克韦尔自动化的ControlLogix系列PLC作为EtherNet/IP协议主站,负责整体的生产流程控制和数据管理。而生产线中的多台库卡机器人作为EtherCAT协议从站设备,承担着电池模组的搬运、装配等关键任务。为实现PLC与机器人之间的高效通信,该企业选用了远创智控的YC-ECTM-EIP协议转换网关。
二、硬件设备
- 罗克韦尔1500PLC:支持标准的EtherNet/IP协议
- 库卡机器人:支持标准的EtherCAT协议
- 远创智控YC-ECTM-EIP协议网关:用于实现实现EtherNet/IP网络与EtherCAT网络之间的数据通讯,即EtherNet/IP和EtherCAT网络之间无缝内部连接

三、技术指标
Ø ECTM-EIP在EtherNet/IP一侧为EtherNet/IP从站,在EtherCAT一侧为EtherCAT主站;
Ø EtherNET/IP最多支持500个字节
Ø 支持拓扑查看器、诊断检测、自动扫描
Ø 支持EtherNet/IP协议;
Ø 支持最大的输入字节数为1500字节,最大的输出字节为1500字节;
Ø 供电:24VDC(±5%),最大功率3.5W ;
Ø 工作环境温度:-25~55℃,湿度≤95%;
四、设备配置及安装
- 将远创智控YC-ECTM-EIP网关安装在控制柜内,接通24V直流电源。
- 使用以太网网线将网关的EtherNet/IP端口与罗克韦尔 ControlLogix PLC 的以太网接口相连。
- 通过EtherCAT网线将网关的EtherCAT端口与库卡机器人的EtherCAT接口连接,构建起通信链路。
参数配置
- 运用远创智控提供的专业配置软件,对网关进行参数设置。在 EtherNet/IP 侧,设定网关的 IP 地址、子网掩码等网络参数,确保与罗克韦尔 PLC 所在网络一致。同时,添加 PLC 的设备描述文件,配置通信周期和超时时间等参数。
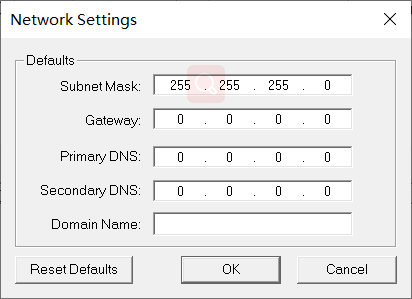
确认计算机与PLC已经建立网络连接,PLC上电后,打开 BOOTP DHCP TOOL软件,
如果第一次打开,在“Tools”(工具)下选择“Networks Setting”(网络设置),输入子网掩码;
如果网络上存在尚未配置的IP地址的PLC模块,工具对话框将会显示该模块的MAC地址,且不断的被刷新;
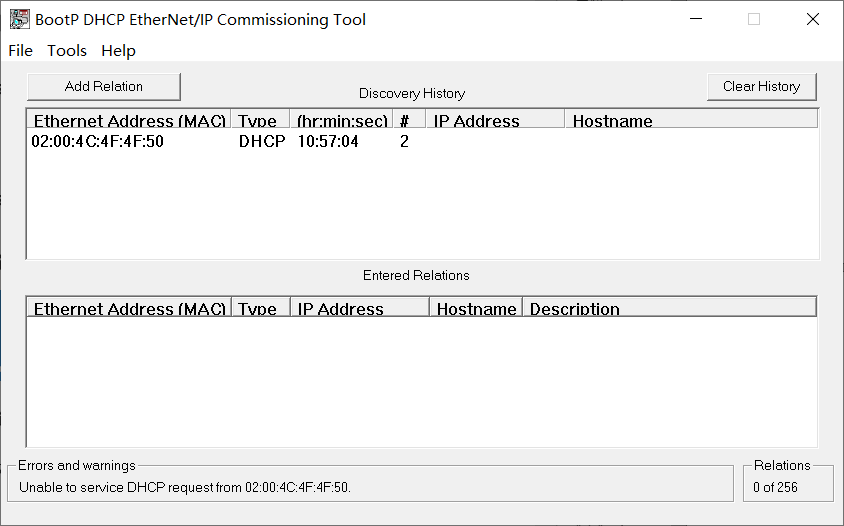
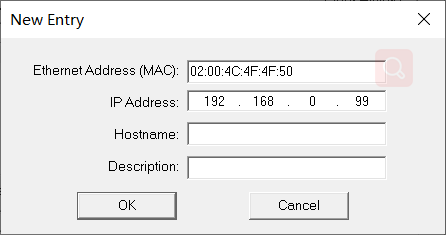
双击MAC地址设备请求,弹出“New Entry”对话框,在“IP Address”处填写IP地址,点击OK;
RSLinx Classic建立计算机与PLC连接
配置以太网通讯驱动
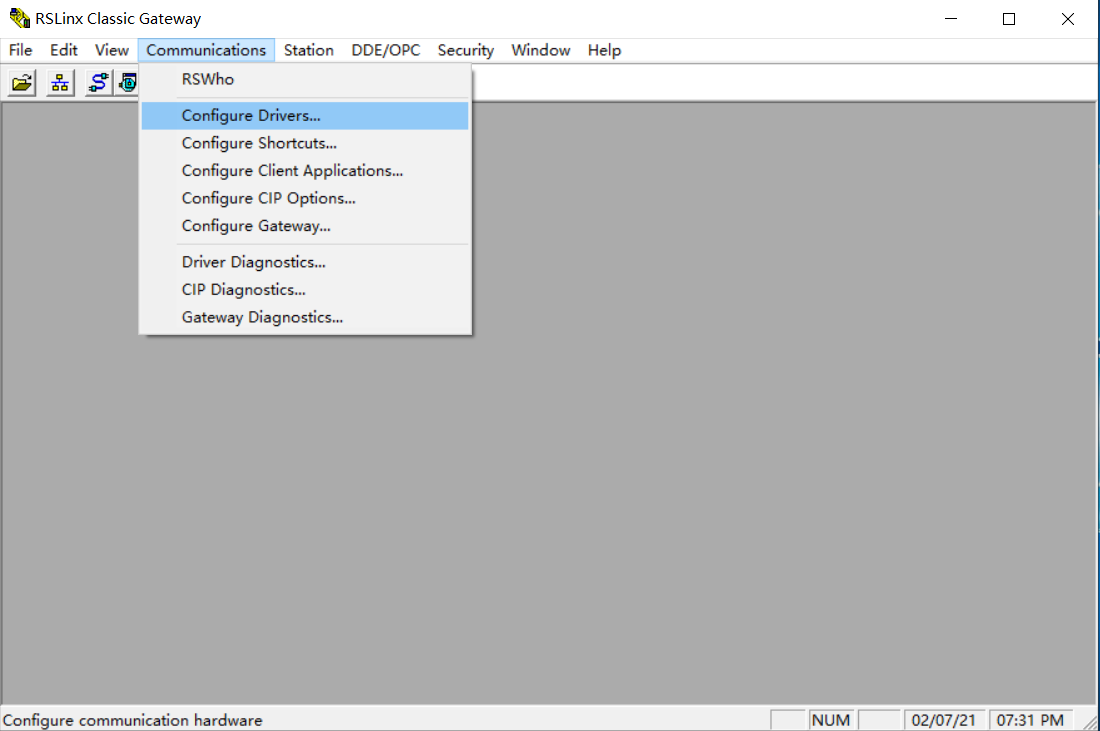
双击 图标,打开软件,在RSLinx软件中配置通讯驱动程序,从 “Communications”(通讯)下拉菜单中选择“Configure Drivers”(配置驱动程序),将出现“Configure Drivers”对话框(在添加新驱动程序之前,确认满足以下条件:工作站正确配置工作站的IP地址和其他网络参数,正确连接到EtherNet/IP网络);
图标,打开软件,在RSLinx软件中配置通讯驱动程序,从 “Communications”(通讯)下拉菜单中选择“Configure Drivers”(配置驱动程序),将出现“Configure Drivers”对话框(在添加新驱动程序之前,确认满足以下条件:工作站正确配置工作站的IP地址和其他网络参数,正确连接到EtherNet/IP网络);
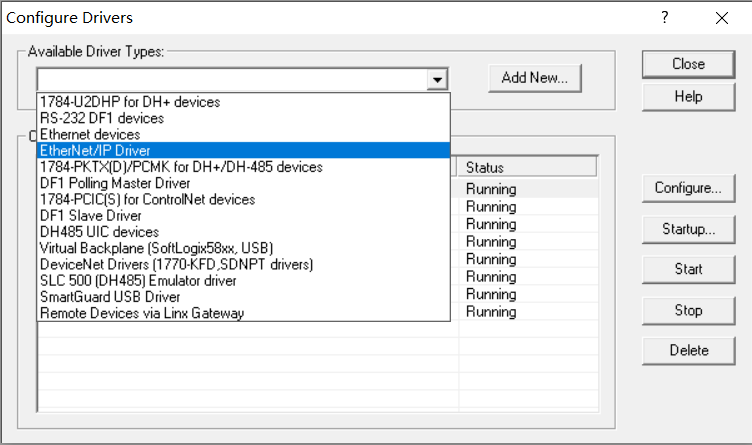
从“Available Driver Types”(可用的驱动程序类型)下拉菜单中选择“EtherNet/IP Driver”(EtherNet/IP驱动程序)或者“Ethernet devices”(以太网设备),然后点击“Add New…”(新加);
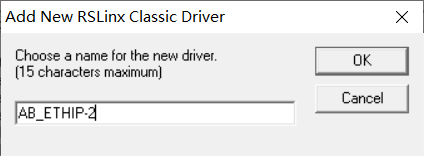
将显示“ Add New RSLinx Classic Driver”(添加新RSLinx Classic驱动程序)对话框;可以修改新的驱动程序名称,此例子接受缺省名字(AB_ETHIP-2)然后单击OK;
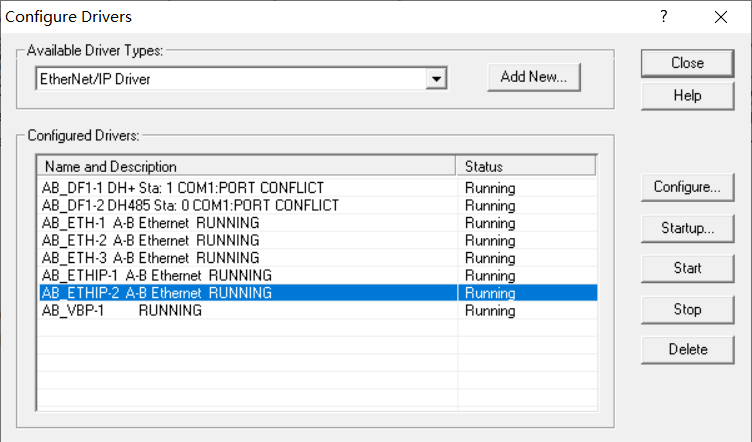
新的驱动程序AB ETHIP - 2 A-B Ethernet RUNNING在Configured Drivers列表里,如下图,点击Close;
点击Communication下拉菜单的RSWho或者点击RSWho图标 ,弹出RSWho对话框,显示控制网络的树状浏览画面,双击AB_ETHIP-2,Ethetnet验证刚才配置的AB_ETHIP驱动能否与Logix控制器或者网关设备进行通讯;(如果有设备的通讯状态出错,例如一个被认可的设备被拔掉,设备显示带红色X,表明RSWho原先认可,但现在无法找到);
,弹出RSWho对话框,显示控制网络的树状浏览画面,双击AB_ETHIP-2,Ethetnet验证刚才配置的AB_ETHIP驱动能否与Logix控制器或者网关设备进行通讯;(如果有设备的通讯状态出错,例如一个被认可的设备被拔掉,设备显示带红色X,表明RSWho原先认可,但现在无法找到);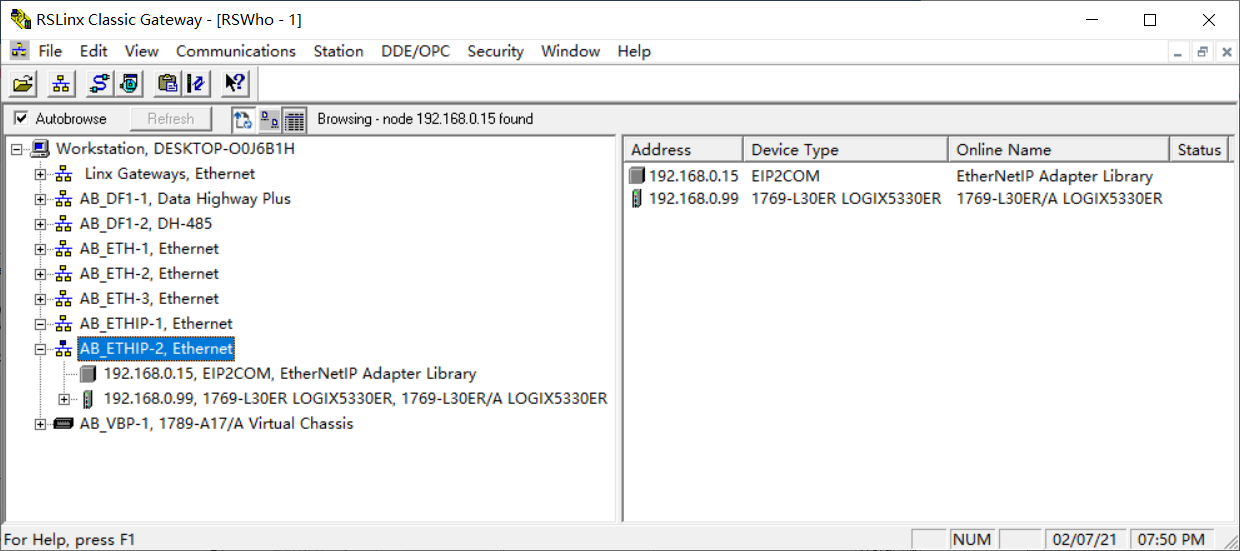
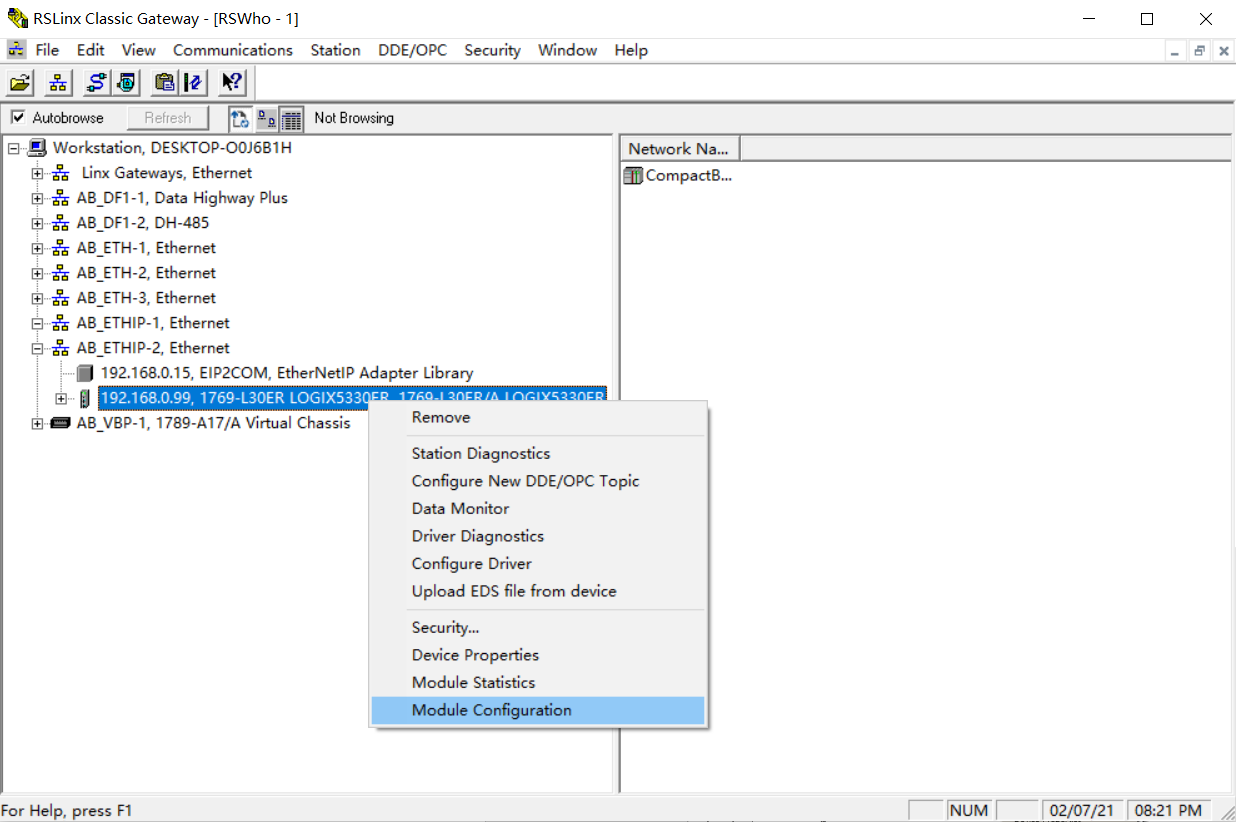
可使用RSLinx软件(或者Studio 5000)修改通讯模块的IP地址,右击EtherNet/IP模块,选择Module Configuration(模块配置)
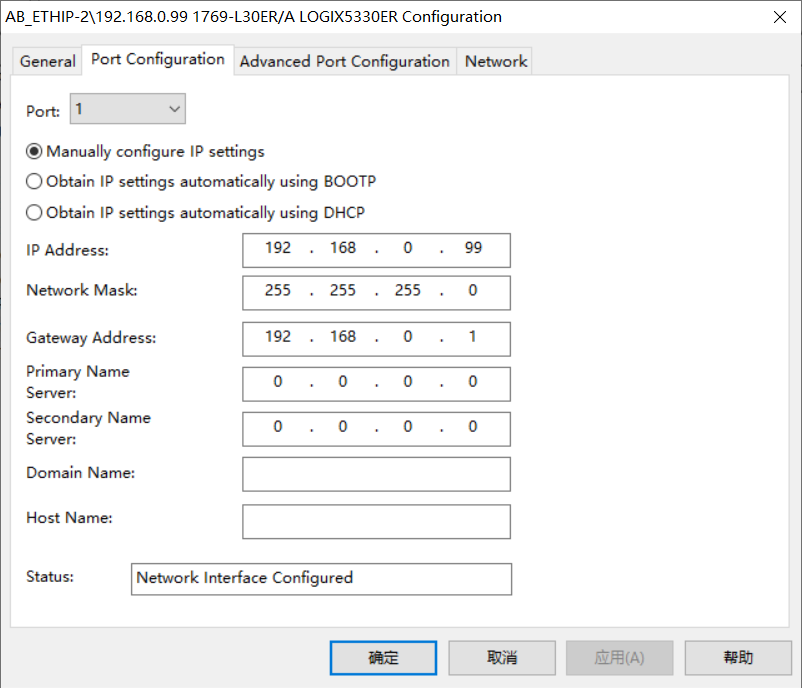
单击Port Configuration(串口配置)选项卡,修改完成后点击确认;
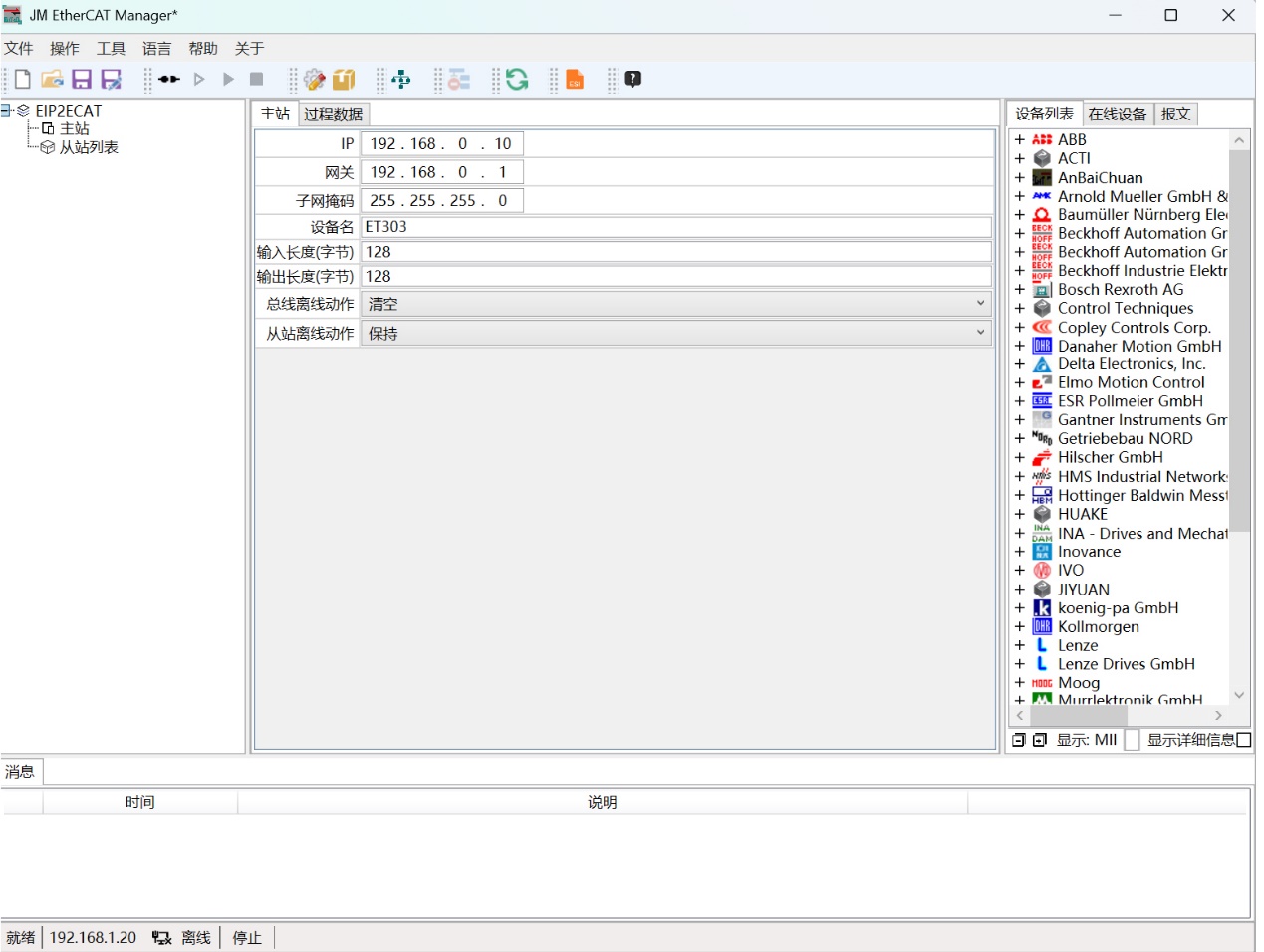
在 EtherCAT 侧,设置网关的从站地址,使其与库卡机器人的通信地址相匹配。根据机器人的工作需求,配置数据传输格式和映射关系,确保数据准确无误地传输。
配置树窗口将当前项目配置显示为一个具有所有PDO条目的树。即整个EtherCAT网络设备,从站显示名称包括从站设备的Device Name以及EtherCAT Address;
新建一个项目工程,配置软件自动加载Master,EtherCAT网络分支通过图标展开和折叠,如图所示:
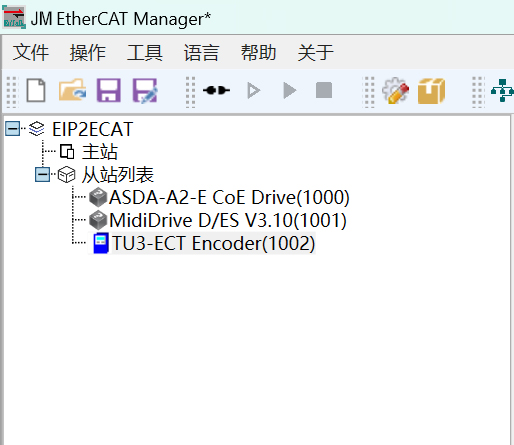
图1-4-28 网络分支展开\折叠
通过单击配置树中的每个从站项目,使其属性显示在配置窗口中,如图所示:
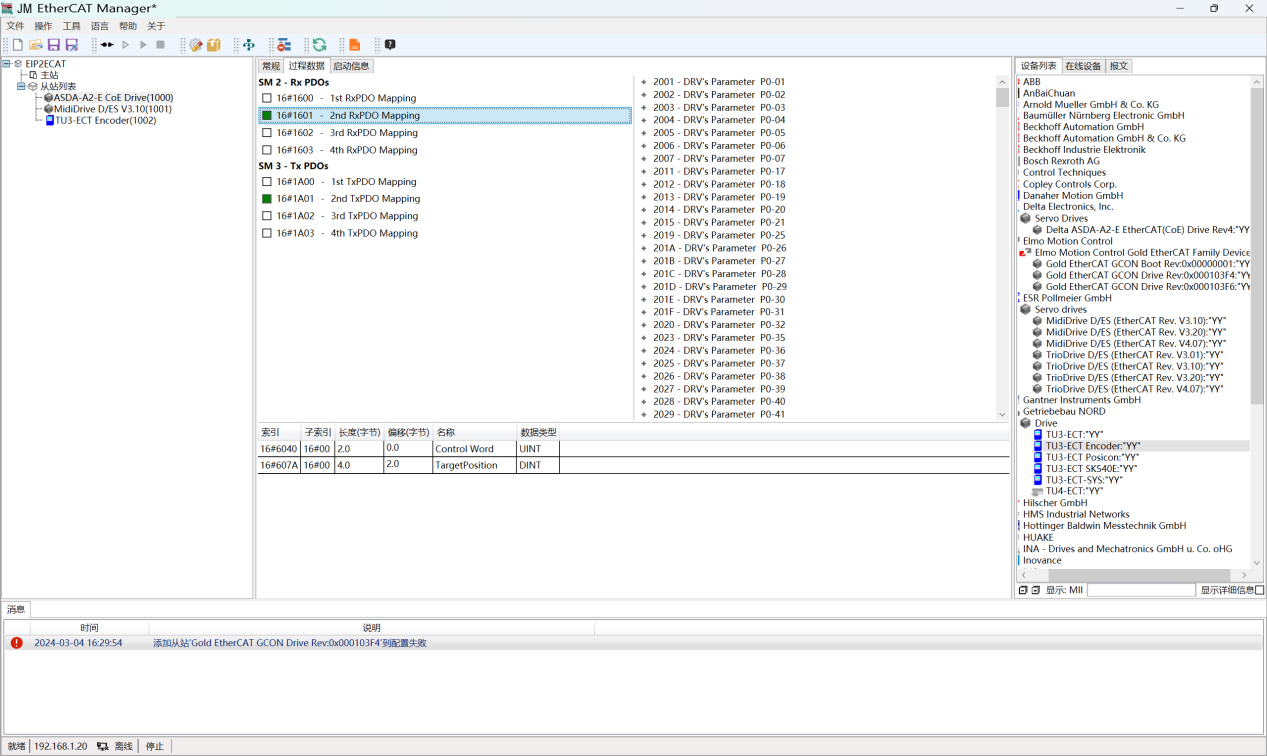
图1-4-29 从站配置信息显示
配置窗口
配置窗口用于显示和编辑下列主站对象和从站信息面板对象的属性,该窗口根据选择的对象不同而改变其视图;
(1) 主站(Master)
五、系统集成与功能实现
- 远创智控YC-ECTM-EIP网关实现了罗克韦尔PLC与库卡机器人之间的数据透明传输。PLC 能够实时获取机器人的位置、姿态、运行状态等信息,同时向机器人发送控制指令,如运动轨迹、速度等参数。
- 通过这种高效的数据交互,生产线能够根据实际生产情况及时调整机器人的工作任务,提高生产效率和灵活性。
协同作业
- 在电池模组装配过程中,罗克韦尔 PLC 通过网关协调多台库卡机器人的动作。例如,一台机器人负责将电池模组搬运到指定位置,另一台机器人进行精确的装配操作。各机器人之间的动作配合紧密,误差控制在极小范围内,大大提高了装配质量。
故障诊断与预警
- 网关实时监测通信状态和设备运行情况,一旦发现异常,立即将故障信息反馈给罗克韦尔 PLC。PLC 根据预设的故障处理策略,及时采取措施,如暂停生产线、发出警报等,避免故障扩大化,减少停机时间。
六、项目效果
- 提高生产效率:通过实现 PLC 与机器人的高效通信和协同作业,生产线的生产效率提高了 25% 以上,大大缩短了电池模组的生产周期。
- 提升产品质量:精确的控制和紧密的协同使得电池模组的装配精度大幅提高,产品次品率降低了 15%,提高了企业的市场竞争力。
- 降低维护成本:及时的故障诊断和预警功能,使得设备维护人员能够快速定位和解决问题,减少了设备的维修时间和成本。
· (具体内容配置过程及其他相关咨询可联系杨工。)
EtherCAT主站协议转换网关
ProfiNet转EtherCAT工业网关实现倍福PLC与西门子远程I/O模块等通讯应用案例
EtherCAT转ProfiNet智能网关将欧姆龙NJ501指令转换至罗克韦尔1734-AENT读取封口温度与包装计数
智慧港口倍福PLC和欧姆龙CJ2M系列PLC通过协议转换网关进行通讯去控制DeviceNet从站设备案例
EtherCAT转Modbus RTU 网关:实现通用机械加工异构设备无缝通信
EtherCAT转Modbus RTU:智能仓储AGV与输送线通信互联改造打通汇川控制器与传感器数据链路
EtherCAT转Modbus RTU:工业网关实现倍福PLC与电芯电压传感器通信互联
EtherCAT转EtherCAT协议转换网关实现欧姆龙PLC与汇川PLC通讯的配置案例
快递分拨中心西门子S7-1500PLC通过EtherCAT主站转Profinet工业智能网关与多个伺服驱动器进行通讯解决方案案例




